discretize.base.BaseRectangularMesh¶
-
class
discretize.base.BaseRectangularMesh(n, x0=None, **kwargs)[source]¶ Bases:
discretize.base.base_mesh.BaseMeshBaseRectangularMeshRequired Properties:
- axis_u (
Vector3): Vector orientation of u-direction. For more details see the docs for therotation_matrixproperty., a 3D Vector of <class ‘float’> with shape (3), Default: X - axis_v (
Vector3): Vector orientation of v-direction. For more details see the docs for therotation_matrixproperty., a 3D Vector of <class ‘float’> with shape (3), Default: Y - axis_w (
Vector3): Vector orientation of w-direction. For more details see the docs for therotation_matrixproperty., a 3D Vector of <class ‘float’> with shape (3), Default: Z - reference_system (
String): The type of coordinate reference frame. Can take on the values cartesian, cylindrical, or spherical. Abbreviations of these are allowed., a unicode string, Default: cartesian - x0 (
Array): origin of the mesh (dim, ), a list or numpy array of <class ‘float’> with shape (*)
- axis_u (
Attributes¶
-
BaseRectangularMesh.axis_u¶ X
Type: axis_u ( Vector3)Type: Vector orientation of u-direction. For more details see the docs for the rotation_matrixproperty., a 3D Vector of <class ‘float’> with shape (3), Default
-
BaseRectangularMesh.axis_v¶ Y
Type: axis_v ( Vector3)Type: Vector orientation of v-direction. For more details see the docs for the rotation_matrixproperty., a 3D Vector of <class ‘float’> with shape (3), Default
-
BaseRectangularMesh.axis_w¶ Z
Type: axis_w ( Vector3)Type: Vector orientation of w-direction. For more details see the docs for the rotation_matrixproperty., a 3D Vector of <class ‘float’> with shape (3), Default
-
BaseRectangularMesh.dim¶ The dimension of the mesh (1, 2, or 3).
Returns: dimension of the mesh Return type: int
-
BaseRectangularMesh.nCy¶ Number of cells in the y direction
Return type: int Returns: nCy or None if dim < 2
-
BaseRectangularMesh.nCz¶ Number of cells in the z direction
Return type: int Returns: nCz or None if dim < 3
-
BaseRectangularMesh.nE¶ Total number of edges.
Returns: nE Return type: int = sum([nEx, nEy, nEz])
-
BaseRectangularMesh.nNy¶ Number of nodes in the y-direction
Return type: int Returns: nNy or None if dim < 2
-
BaseRectangularMesh.nNz¶ Number of nodes in the z-direction
Return type: int Returns: nNz or None if dim < 3
-
BaseRectangularMesh.normals¶ Face Normals
Return type: numpy.ndarray Returns: normals, (sum(nF), dim)
-
BaseRectangularMesh.reference_is_rotated¶ True if the axes are rotated from the traditional <X,Y,Z> system with vectors of \((1,0,0)\), \((0,1,0)\), and \((0,0,1)\)
-
BaseRectangularMesh.reference_system¶ cartesian
Type: reference_system ( String)Type: The type of coordinate reference frame. Can take on the values cartesian, cylindrical, or spherical. Abbreviations of these are allowed., a unicode string, Default
-
BaseRectangularMesh.rotation_matrix¶ Builds a rotation matrix to transform coordinates from their coordinate system into a conventional cartesian system. This is built off of the three axis_u, axis_v, and axis_w properties; these mapping coordinates use the letters U, V, and W (the three letters preceding X, Y, and Z in the alphabet) to define the projection of the X, Y, and Z durections. These UVW vectors describe the placement and transformation of the mesh’s coordinate sytem assuming at most 3 directions.
Why would you want to use these UVW mapping vectors the this rotation_matrix property? They allow us to define the realationship between local and global coordinate systems and provide a tool for switching between the two while still maintaing the connectivity of the mesh’s cells. For a visual example of this, please see the figure in the docs for the
vtkInterface.
-
BaseRectangularMesh.tangents¶ Edge Tangents
Return type: numpy.ndarray Returns: normals, (sum(nE), dim)
-
BaseRectangularMesh.vnC¶ Total number of cells in each direction
Return type: numpy.ndarray Returns: [nCx, nCy, nCz]
-
BaseRectangularMesh.vnE¶ Total number of edges in each direction
Returns: - vnE (numpy.ndarray = [nEx, nEy, nEz], (dim, ))
- .. plot:: – :include-source:
import discretize import numpy as np M = discretize.TensorMesh([np.ones(n) for n in [2,3]]) M.plotGrid(edges=True, showIt=True)
-
BaseRectangularMesh.vnEx¶ Number of x-edges in each direction
Return type: numpy.ndarray Returns: vnEx
-
BaseRectangularMesh.vnEy¶ Number of y-edges in each direction
Return type: numpy.ndarray Returns: vnEy or None if dim < 2
-
BaseRectangularMesh.vnEz¶ Number of z-edges in each direction
Return type: numpy.ndarray Returns: vnEz or None if dim < 3
-
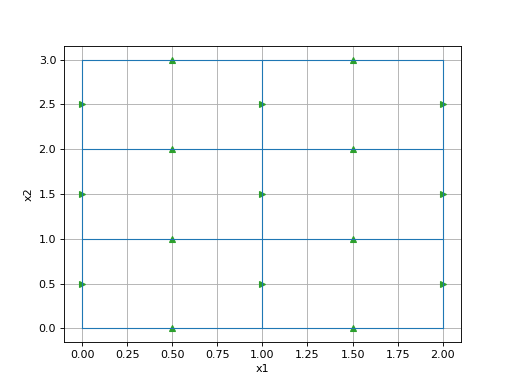
BaseRectangularMesh.vnF¶ Total number of faces in each direction
Return type: numpy.ndarray Returns: [nFx, nFy, nFz], (dim, ) import discretize import numpy as np M = discretize.TensorMesh([np.ones(n) for n in [2,3]]) M.plotGrid(faces=True, showIt=True)
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
BaseRectangularMesh.vnFx¶ Number of x-faces in each direction
Return type: numpy.ndarray Returns: vnFx
-
BaseRectangularMesh.vnFy¶ Number of y-faces in each direction
Return type: numpy.ndarray Returns: vnFy or None if dim < 2
-
BaseRectangularMesh.vnFz¶ Number of z-faces in each direction
Return type: numpy.ndarray Returns: vnFz or None if dim < 3
-
BaseRectangularMesh.vnN¶ Total number of nodes in each direction
Return type: numpy.ndarray Returns: [nNx, nNy, nNz]
Methods¶
-
BaseRectangularMesh.copy()¶ Make a copy of the current mesh
-
classmethod
BaseRectangularMesh.deserialize(value, trusted=False, strict=False, assert_valid=False, **kwargs)¶ Creates HasProperties instance from serialized dictionary
This uses the Property deserializers to deserialize all JSON-compatible dictionary values into their corresponding Property values on a new instance of a HasProperties class. Extra keys in the dictionary that do not correspond to Properties will be ignored.
Parameters:
- value - Dictionary to deserialize new instance from.
- trusted - If True (and if the input dictionary has
'__class__'keyword and this class is in the registry), the new HasProperties class will come from the dictionary. If False (the default), only the HasProperties class this method is called on will be constructed. - strict - Requires
'__class__', if present on the input dictionary, to match the deserialized instance’s class. Also disallows unused properties in the input dictionary. Default is False. - assert_valid - Require deserialized instance to be valid. Default is False.
- Any other keyword arguments will be passed through to the Property deserializers.
-
BaseRectangularMesh.equal(other)¶ Determine if two HasProperties instances are equivalent
Equivalence is determined by checking if all Property values on two instances are equal, using
Property.equal.
-
BaseRectangularMesh.projectEdgeVector(eV)¶ Given a vector, eV, in cartesian coordinates, this will project it onto the mesh using the tangents
Parameters: eV (numpy.ndarray) – edge vector with shape (nE, dim) Return type: numpy.ndarray Returns: projected edge vector, (nE, )
-
BaseRectangularMesh.projectFaceVector(fV)¶ Given a vector, fV, in cartesian coordinates, this will project it onto the mesh using the normals
Parameters: fV (numpy.ndarray) – face vector with shape (nF, dim) Return type: numpy.ndarray Returns: projected face vector, (nF, )
-
BaseRectangularMesh.r(x, xType='CC', outType='CC', format='V')[source]¶ r is a quick reshape command that will do the best it can at giving you what you want.
For example, you have a face variable, and you want the x component of it reshaped to a 3D matrix.
r can fulfil your dreams:
mesh.r(V, 'F', 'Fx', 'M') | | | | | | | { | | | How: 'M' or ['V'] for a matrix | | | (ndgrid style) or a vector (n x dim) | | | } | | { | | What you want: ['CC'], 'N', | | 'F', 'Fx', 'Fy', 'Fz', | | 'E', 'Ex', 'Ey', or 'Ez' | | } | { | What is it: ['CC'], 'N', | 'F', 'Fx', 'Fy', 'Fz', | 'E', 'Ex', 'Ey', or 'Ez' | } { The input: as a list or ndarray }
For example:
# Separates each component of the Ex grid into 3 matrices Xex, Yex, Zex = r(mesh.gridEx, 'Ex', 'Ex', 'M') # Given an edge vector, return just the x edges as a vector XedgeVector = r(edgeVector, 'E', 'Ex', 'V') # Separates each component of the edgeVector into 3 vectors eX, eY, eZ = r(edgeVector, 'E', 'E', 'V')
-
BaseRectangularMesh.save(filename='mesh.json', verbose=False)¶ Save the mesh to json :param str file: filename for saving the casing properties :param str directory: working directory for saving the file
-
BaseRectangularMesh.serialize(include_class=True, save_dynamic=False, **kwargs)¶ Serializes a HasProperties instance to dictionary
This uses the Property serializers to serialize all Property values to a JSON-compatible dictionary. Properties that are undefined are not included. If the HasProperties instance contains a reference to itself, a
properties.SelfReferenceErrorwill be raised.Parameters:
- include_class - If True (the default), the name of the class
will also be saved to the serialized dictionary under key
'__class__' - save_dynamic - If True, dynamic properties are written to the serialized dict (default: False).
- Any other keyword arguments will be passed through to the Property serializers.
- include_class - If True (the default), the name of the class
will also be saved to the serialized dictionary under key
-
BaseRectangularMesh.toVTK(models=None)¶ Convert this mesh object to it’s proper
vtkidata object with the given model dictionary as the cell data of that dataset.Parameters: models (dict(numpy.ndarray)) – Name(‘s) and array(‘s). Match number of cells
-
BaseRectangularMesh.validate()¶ Call all registered class validator methods
These are all methods decorated with
@properties.validator. Validator methods are expected to raise a ValidationError if they fail.
-
BaseRectangularMesh.writeVTK(fileName, models=None, directory='')¶ Makes and saves a VTK object from this mesh and given models
Parameters: